
- 개발 환경 : Rasberry Pi 4B (Ubuntu 18.04 / ROS melodic)
- 준비물 : Pi Camera V2.1
- 참조 : https://chuckmails.medium.com/enable-pi-camera-with-raspberry-pi4-ubuntu-20-10-327208312f6e
https://larrylisky.com/2016/11/24/enabling-raspberry-pi-camera-v2-under-ubuntu-mate/
https://gist.github.com/xxl007/5db5a3625f3a5914541c84c37b380bfa
https://www.codetd.com/en/article/12943496
라즈베리파이 설정을 위한 raspi-config 설치
$ wget http://archive.raspberrypi.org/debian/pool/main/r/raspi-config/raspi-config_20200817_all.deb
$ dpkg -i raspi-config_20200817.deb
$ sudo apt --fix-broken install
$ rosdep install raspi-config_20200817.deb
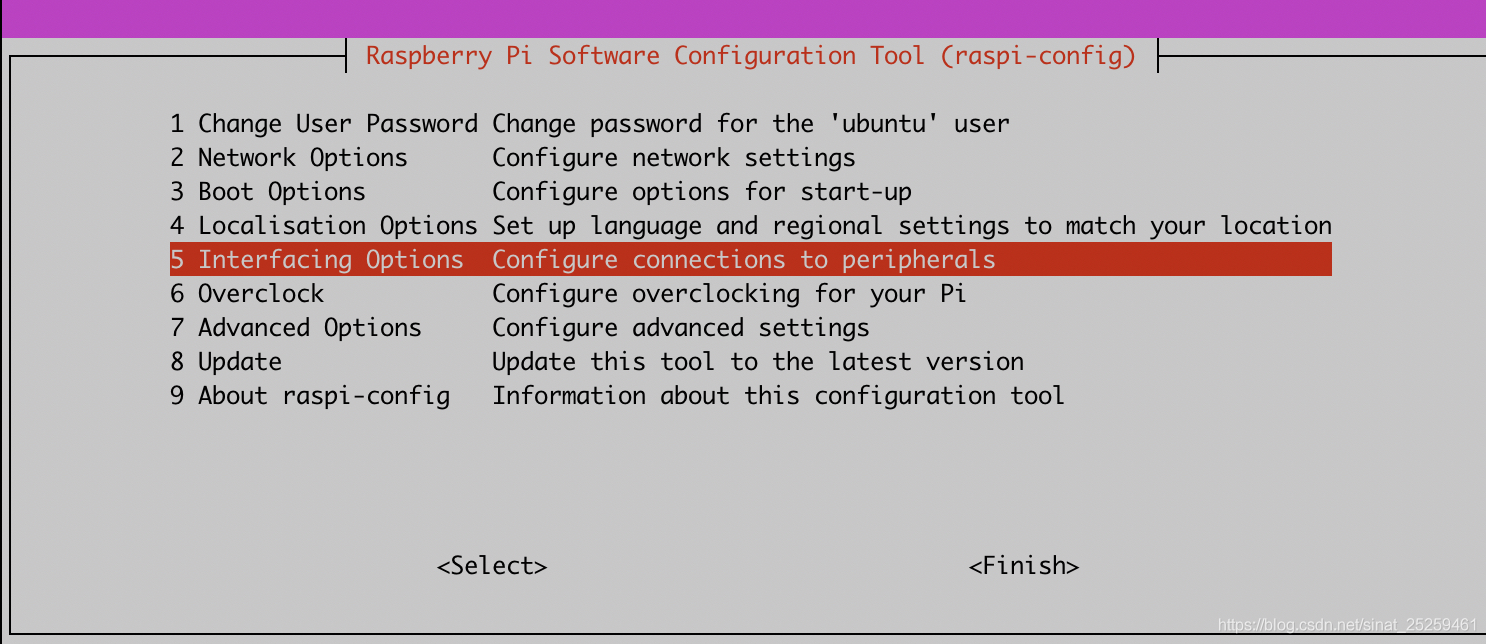
$ sudo raspi-config
5 Interfacing Options - P1 Camera에 들어가서 Enable해줍니다.

※ firmware 에러 발생 시
Your firmwave appears to be out of date (no start_x.elf). Please update해결법
$ sudo nano /boot/firmware/config.txt
#문구 추가
start_x=1
gpu_mem=128그래도 안되면
$ df -h
$ mount /dev/mmcblk0p1 /boot
$ ls -al /dev/ | grep video
$ sudo apt-get install v4l-utils
$ v4l2-ctl --list-devices
$ sudo apt install ffmpeg
$ ffplay /dev/video0D-bus 에러 발생 시
$ export DBUS_FATAL_WARNINGS=0
$ ffplay /dev/video0'작업 일기' 카테고리의 다른 글
| Hector SLAM (0) | 2022.01.18 |
|---|---|
| Arduino와 ROS로 DC 모터 x2 제어하기 (0) | 2021.12.29 |
| ROS를 이용하여 Velodyne Lidar (VLP-16) 구동시키기 (1) | 2021.12.01 |
| Raspberry Pi 4B에서 모터 드라이버 (MD200T) 구동하기 (0) | 2021.11.12 |
| Arduino와 ROS로 Flexible LED 구동하기 (0) | 2021.10.28 |



